Sag-Free Deformable Simulations
Initializing simulations of deformable objects involves setting the rest state of all internal forces at the rest shape of the object. However, often times the rest shape is not explicitly provided. In its absence, it is common to initialize by treating the given initial shape as the rest shape. This leads to sagging, the undesirable deformation under gravity as soon as the simulation begins. Prior solutions to sagging are limited to specific simulation systems and material models, most of them cannot handle frictional contact, and they require solving expensive global nonlinear optimization problems.
We introduce a novel solution to the sagging problem that can be applied to a variety of simulation systems and materials. The key feature of our approach is that we avoid solving a global nonlinear optimization problem by performing the initialization in two stages. First, we use a global linear optimization for static equilibrium. Any nonlinearity of the material definition is handled in the local stage, which solves many small local problems efficiently and in parallel. Notably, our method can properly handle frictional contact orders of magnitude faster than prior work. We show that our approach can be applied to various simulation systems by presenting examples with mass-spring systems, cloth simulations, the finite element method, the material point method, and position-based dynamics.
Example Results





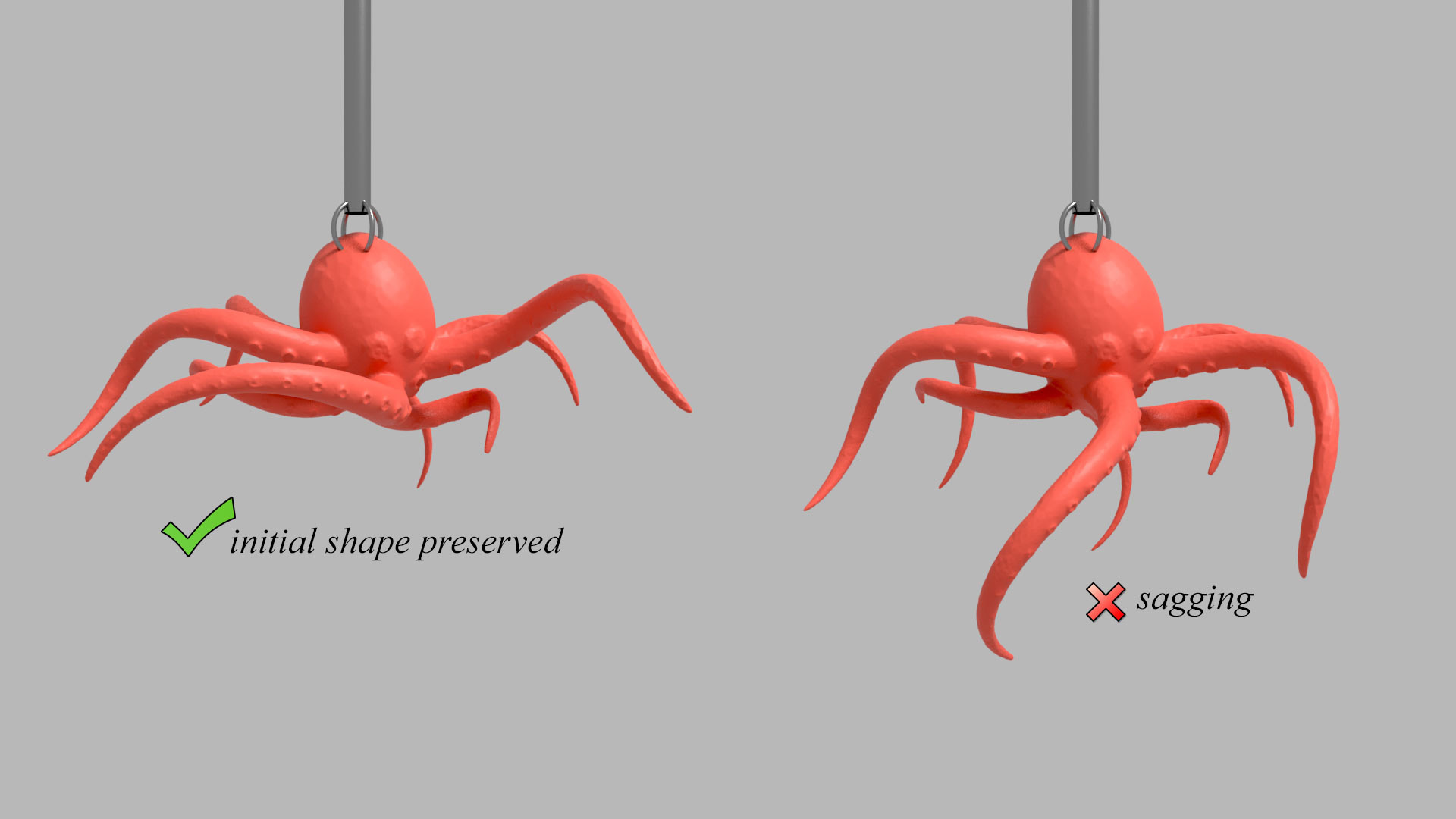
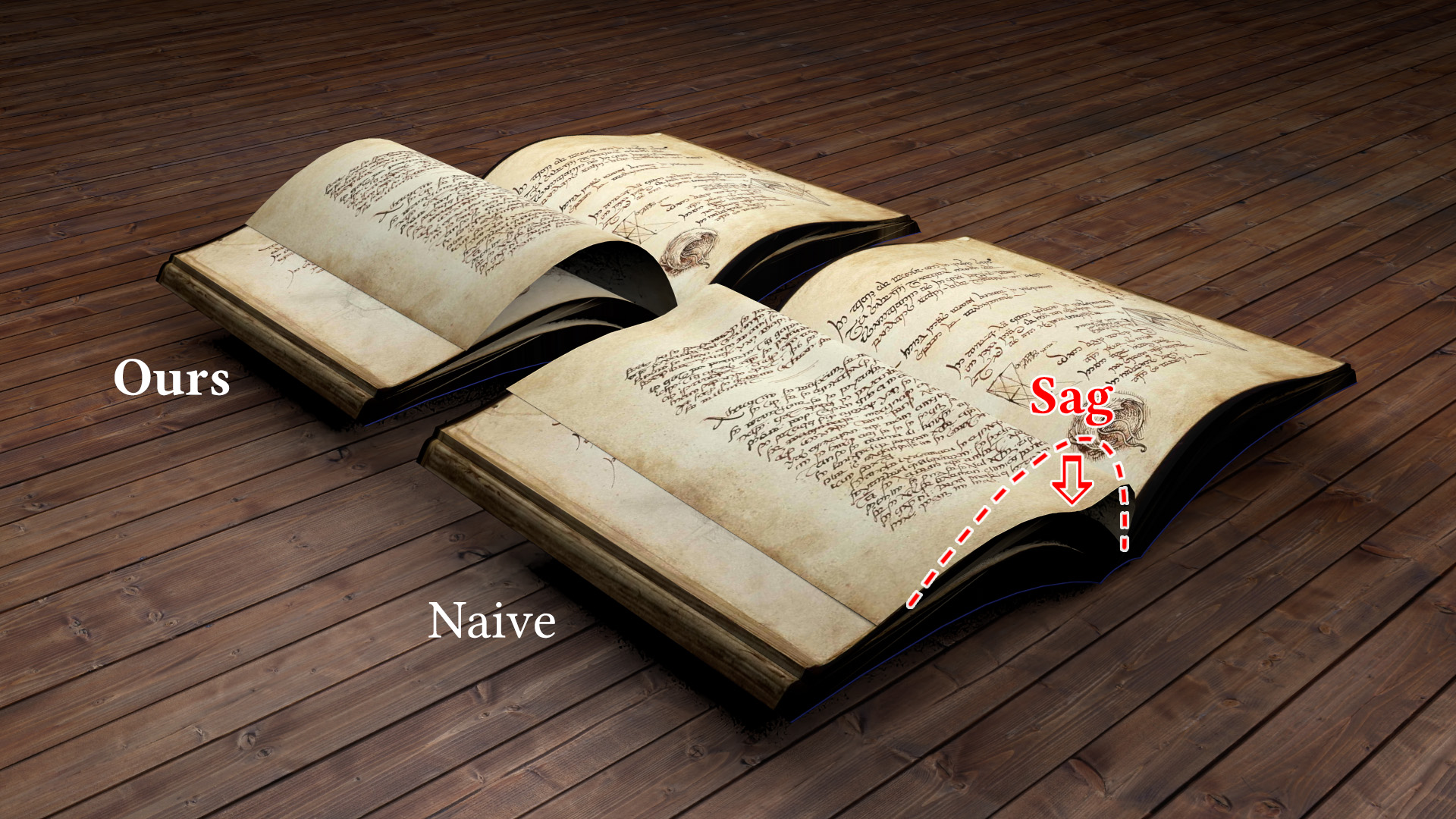

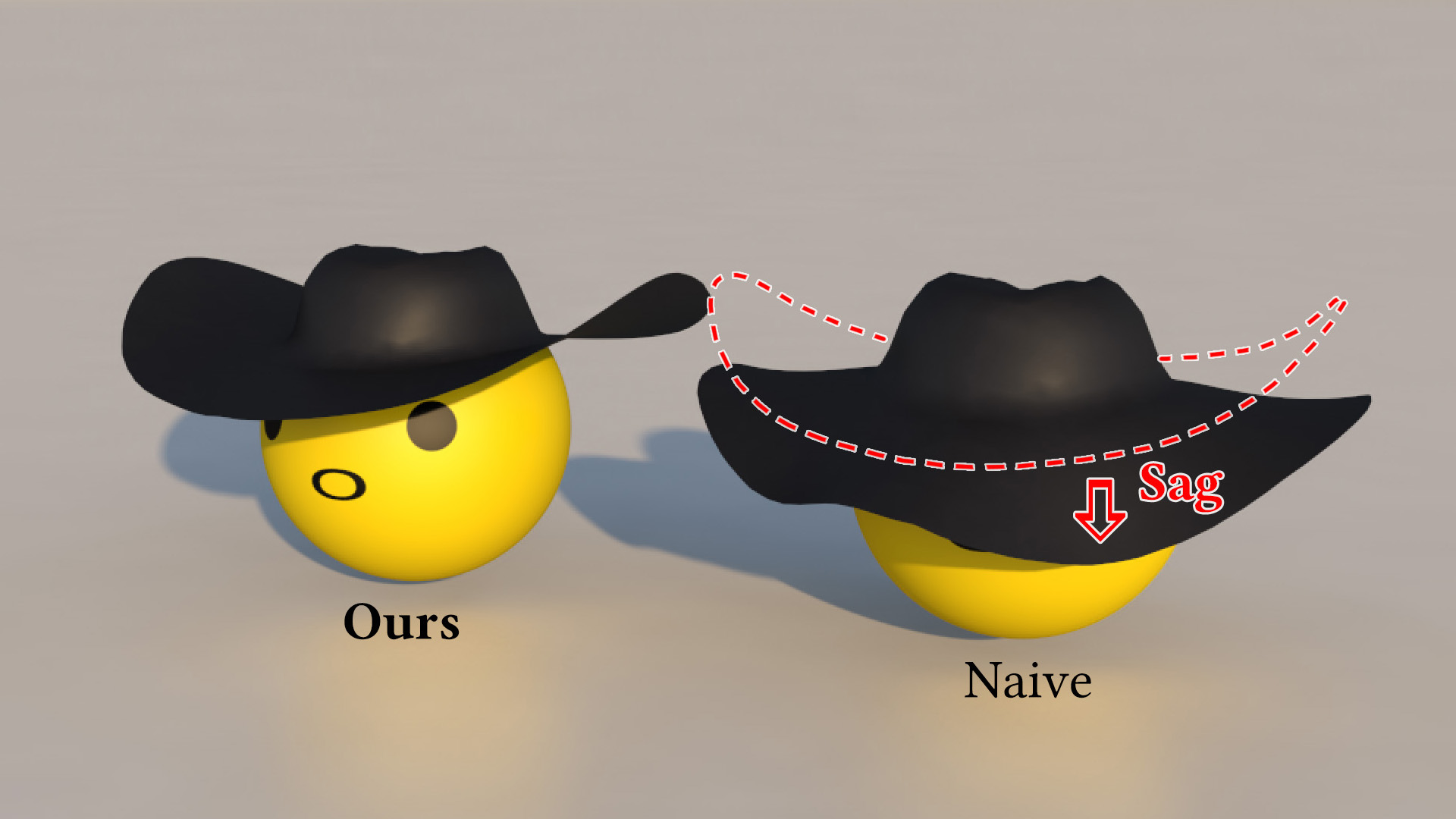
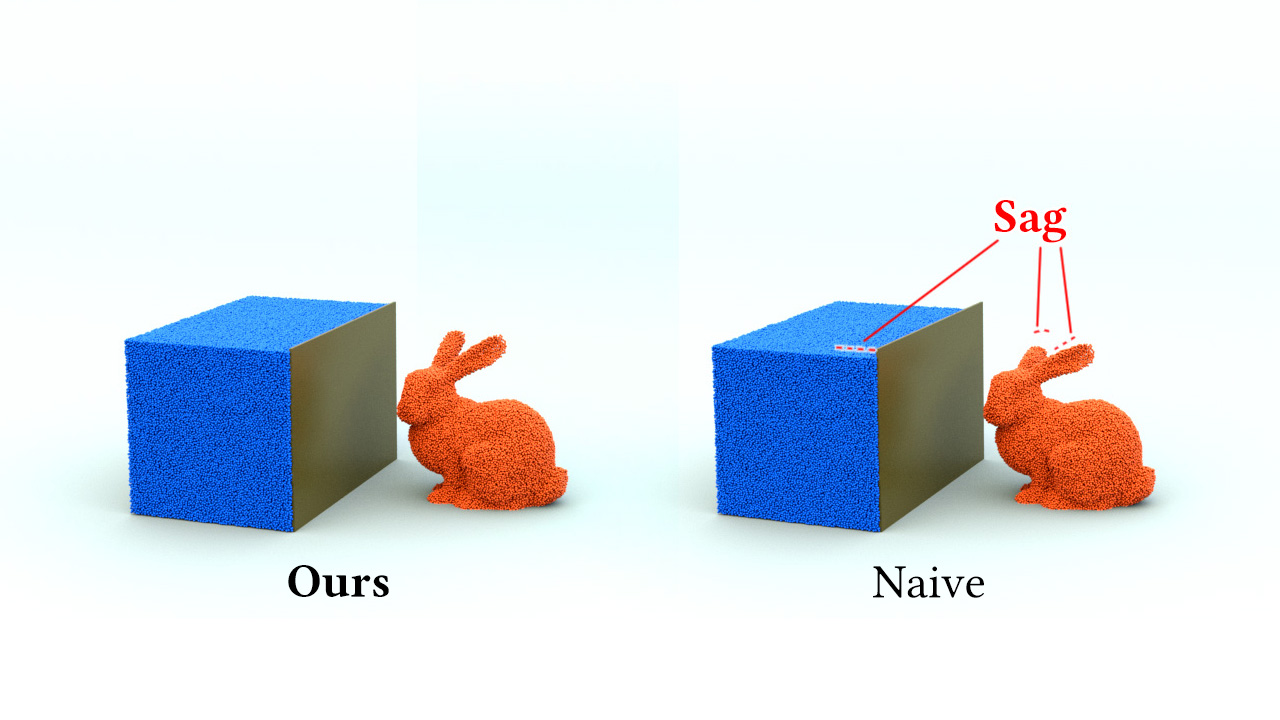
Our initialization method for deformable simulations maintains the given initial shape of the model and prevents sagging, which is common with naive initialization, causing the model to collapse under its own weight as soon as the simulation begins to apply gravity.
Paper Video

Project Publications
